有限馬可夫決策過程(Finite Markov Decision Process, Finite MDP)
馬可夫決策過程是強化學習中的架構,特點是未來的狀態只取決於當前狀態與動作,與過去無關,在這個狀態性質下則稱為馬可夫性質(Markov Property)。
基礎元素有:
- :有限的狀態空間(State space)
- :有限的動作空間(Action space)
- :轉移機率函數(Transition probability),表示在狀態執行動作轉移到狀態的機率
- :報酬函數(Reward function),在狀態採取動作後所得到的期望報酬
- :折扣因子(Discount factor),用來折扣未來的報酬,當考慮長遠報酬則趨近1,短期報酬則越小
決策流程
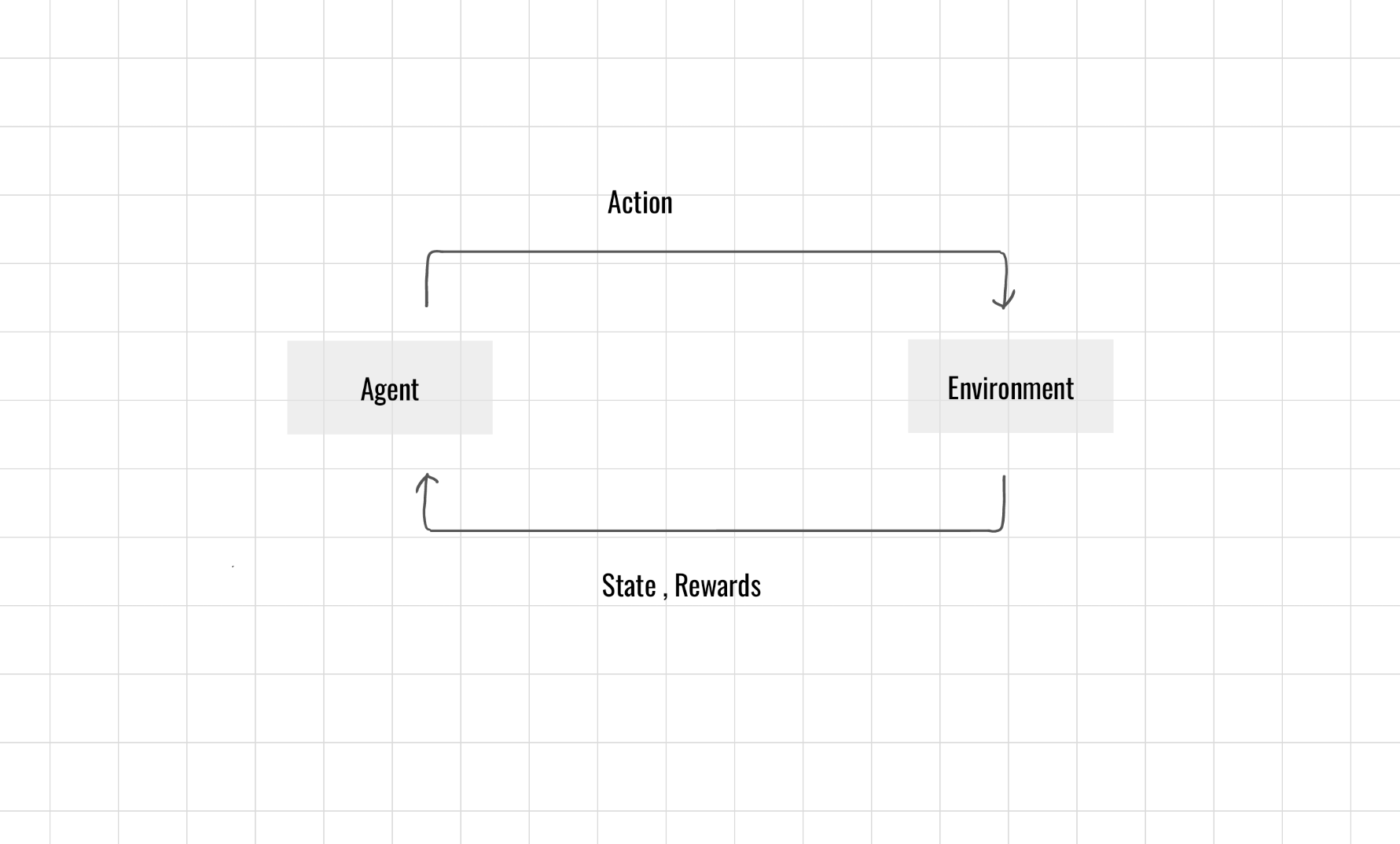
在有限馬可夫決策過程中,智能體(Agent)與環境(Environment)在離散時間點進行互動。於每個時間步 ,智能體觀察當前環境狀態 ,並基於該狀態選擇動作 。環境接收此動作後,會回應一個數值獎勵 以及下一個狀態 ,促成智能體與環境之間的連續交互過程。
離散時間(discrete time)表示為:
在強化學習中,智能體與環境的互動即發生於這些離散的時間步數(time steps),每一步對應一次觀察、行動與回饋。
將整體互動過程用橫式表示則為:
轉移機率函數(Transition Probability)
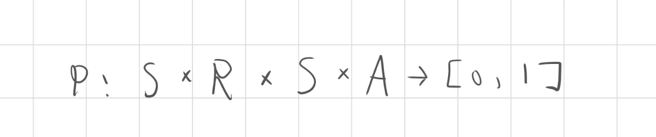
轉移機率函數也稱為動態函數,這裡以P表示,包含狀態S、獎勵R、動作A狀態集合,在同一次行動中的機率將映射在0到1之間。
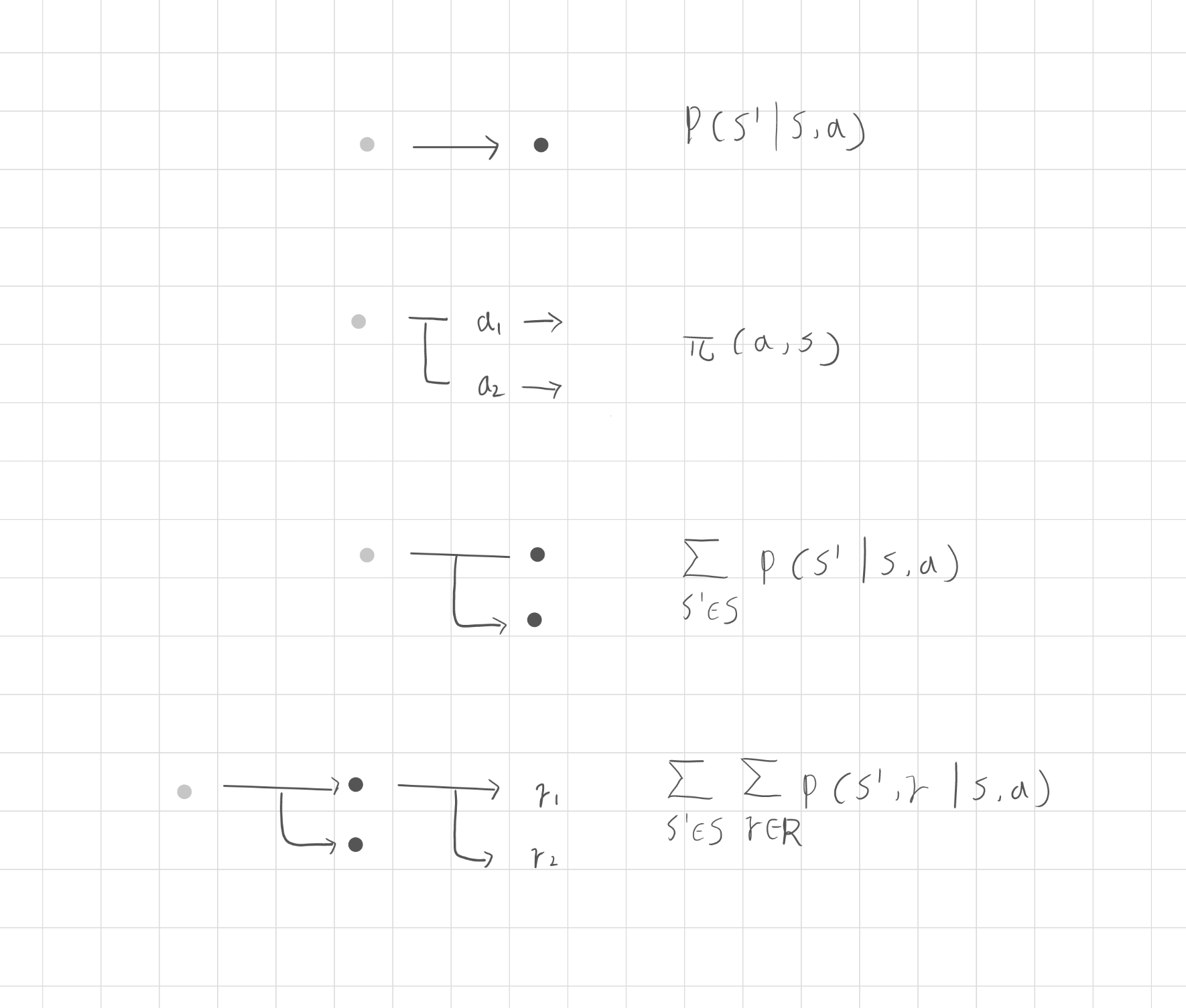
動態函數描述下一狀態與獎勵只依賴當前狀態與動作來考慮,而這個動態函數的轉移機率則可以表示為以下
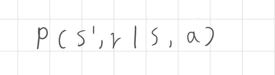
該公式描述在狀態 下執行動作 ,並且轉移到下一個單一狀態 的機率,獲得獎勵 的機率
機率分布(probability distribution)
理解動態函數的轉移機率後,再來是延伸機率論中的機率分布的表示方法
聯合機率方法表示為:
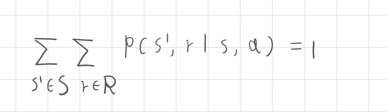
該公式描述為當滿足 狀態動作下,轉移至下一個動作所獲得的獎勵機率總和為1,需要留意這裡的是以發生單一事件,而轉移至下一個可能發生的所有狀態與獎勵,因此將所有的事件機率加總機率將等於1。
邊際機率
邊際機率與聯合機率不同,這部分不考慮所有的狀態s',只考慮一個狀態下的所有獎勵機率,因此這裡將所有可能的獎勵值 的機率加總起來,而機率總和等於1

狀態轉移機率分佈概念
期望獎勵 (Expected Reward)
簡單回顧一下期望值的觀念,期望值為一個連續事件機率下的獎勵平均作為價值評估,表示為
在有限馬可夫決策過程中,若考慮不同條件下的參數,獎勵的期望值在兩個參數時表示為狀態-行動 在三個參數時表示為 狀態-行動-未來狀態
狀態-行動
若計算當前 的獎勵期望值表示為
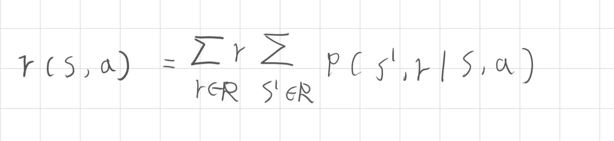
在狀態 採取動作 時,對所有可能的 和 做加權平均,求得期望值
一個例子
假設
- ,且
可以留意到這裡在狀態和動作下的獎勵他是一個整體得機率分佈,因此他的下一個狀態機率總和應等於1
狀態-行動-未來狀態
當期望獎勵固定下一狀態 ,則已知 (s'),因此只考慮這個 (s') 下所有可能的獎勵 (r)。這是條件分布的概念,在邊際機率討論單一變數的情況下,分母是條件機率的總和,必定 < 1
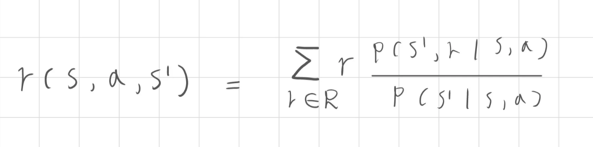
分母 是轉移到 的機率總和 分子 是到達 並獲得不同獎勵的加權後的總和
一個例子
假設
分母是s'狀態轉移機率
計算 的獎勵期望值
延伸思考,這個例子我們可以確定 的發生機率等於 0.5 裡面有兩個獎勵的機率,我們可以推測 的發生機率必定等於 0.5 ,但是裡面的獎勵集合數目與獎勵未知。